AUS DER FORSCHUNG I
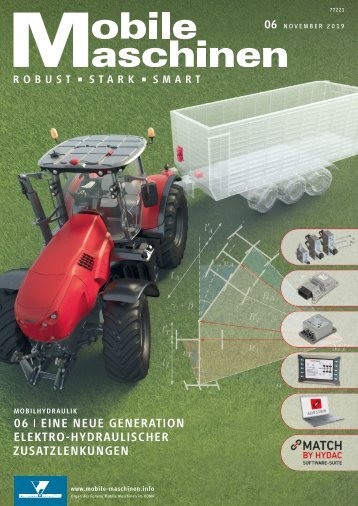
AUS DER FORSCHUNG I KOMMUNALMASCHINEN Saubere Straßen tragen zur Verkehrssicherheit bei. Laub stellt ein nicht zu unterschätzendes Unfallrisiko dar. Straßenkehrmaschinen sorgen dafür, dass dieses Risiko von den Straßen verschwindet. Beim Kehrprozess gibt es noch Optimierungspotenzial. Das zeigt das im Folgenden dargestellte Forschungsprojekt. Aspekte des Kehrprozesses von Straßenkehrmaschinen Wie die Straßenreinigung optimiert werden kann Straßenkehrmaschinen können nach dem Volumen des Kehrgutbehälters in kleine (bis 1,5 m 3 ), mittlere (bis 4,5 m 3 ) und große (bis 7 m 3 ) eingeteilt werden und gemäß der Kehrgutförderung in saugend aufnehmende als auch in Straßenkehrmaschinen mit mechanischer Kehrgutaufnahme gegliedert werden. Alle oben aufgeführten Straßenkehrmaschinen sind mit einem bis drei Tellerbesen und mit Kehrwalzen ausgerüstet. Während das Verhalten der Tellerbesen mehrfach untersucht worden ist [1], [2] sind bis heute keine Untersuchungen zum eigentlichen Kehrprozess vorgenommen worden, die wichtige Informationen zur Optimierung geben könnten. Während eines vom BMBF finanzierten Forschungsprojektes haben die Autoren eine Untersuchung des Kehrprozesses durchgeführt. In einem ersten Arbeitsschritt wird der Kehrprozess mit Tellerbesen untersucht. In Figur 1 werden die folgenden Bezeichnungen verwendet: R = Radius des Tellerbesens; h = Höhe der Kehrgutschicht, α = Neigungswinkel des Tellerbesens zur x- Achse; ω = Winkelgeschwindigkeit des Tellerbesens; ν m = Kehrgeschwindigkeit der Kehrmaschine in Fahrtrichtung (y – Achse). Die räumliche Flugbahn des Kehrgutpartikels wird von der Geschwindigkeit ν m der Kehrmaschine als auch der Drehzahl des Tellerbesens sowie mehreren Parametern (dem Radius R des Tellerbesens α, dem Neigungswinkel des Tellerbesens, dem spe 01 Tellerbesen im Eingriff Untersuchung des Kehrprozesses Autoren: Prof. Dr. Ioan Călin Roşca, Dekan der Fakultät für Maschinenbau der Universität Transilvania aus Brasov/Rumänien, Prof. Dr. Michael Butsch HTWG-Konstanz 40 Mobile Maschinen 1/2017
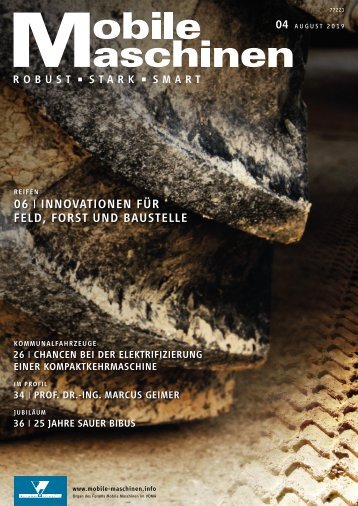
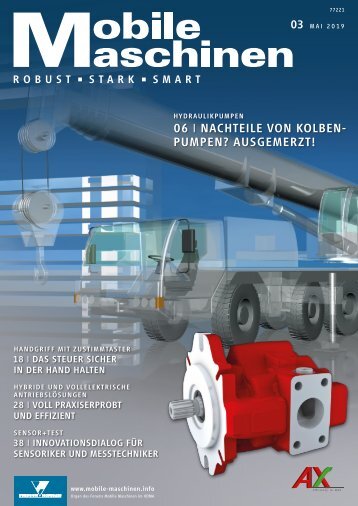
KOMMUNALMASCHINEN I AUS DER FORSCHUNG 02 Draufsicht auf eine Aufbaustraßenkehrmaschine Wurfweite in Z Richtung [m] x 10 -3 0.3 12 0.25 10 0.2 8 0.15 6 0.1 4 0.05 2 0 0 -0.05 0 0.5 1 1.5 2 2.5 3 Wurfweite in Y Richtung [m] Wurfweite in Z Richtung [m] -2 0 0.05 0.1 0.15 0.2 0.25 Wurfweite in Y Richtung [m] 04 Wurfbahn bei einer Besendrehzahl von 200 min -1 zifischen Gewicht des Kehrgutpartikels, etc.) bestimmt. Der Kehrprozess kann als gut bezeichnet werden, wenn alle aufgekehrten Kehrgutpartikel ortsnahe vor der Saugdüse auf die Fahrbahn fallen. Auf der Suche nach dem optimalen Kehrbild Das Ziel der Untersuchungen ist die Drehzahl des Tellerbesens mit der Fahrgeschwindigkeit der Kehrmaschine so zu verknüpfen, dass der Kehrprozess optimiert wird. Das Ergebnis wird sich in einem optimalen Kehrbild als auch einem geringeren Besenverscheiß und Kraftstoffverbrauch niederschlagen. Die räumliche Flugbahn des Kehrgutpartikels wird durch eine Parabel im Raum dargestellt; diese kann mit Hilfe des Programms Matlab/Simulink rechnerisch ermittelt und grafisch dargestellt werden. Die errechnete Flugbahn kann mit Hilfe der 03 Wurfbahn bei einer Besendrehzahl von 250 min -1 Formeln aus der klassischen Mechanik bestimmt werden und muss mit Hilfe von Korrekturparametern auf tatsächliche Werte angepasst werden. Beispielhaft werden untenstehend die räumlichen Flugbahnen für folgende Größen widergegeben: n = 250 min -1 (Drehzahl des Tellerbesens), R Besen = 300 mm, r_K gprt = 10 mm (Größe des Kehrgutpartikels), α = 10°, ν m = 6,5 km/h (Figur 3) und n = 200 1/min (Drehzahl des Tellerbesen), R Besen = 300 mm, r Kgprt = 10 mm (Größe des Kehrgutpartikels), α = 10°,ν m = 6,5 km/h (Figur 4), und die Masse des Kehrgutpartikels ist mit 7 Gramm angesetzt worden. Die vorliegende Arbeit stellt einen ersten Schritt dar. Die Ergebnisse müssen noch Info: durch praktische Versuche überprüft werden und gegebenen Falls durch Korrekturfaktoren ergänzt werden. Das angestrebte Endergebnis kann mit Hilfe eines Mikrocontrollers zu einer hydraulischen Regelung führen, welche die optimale Tellerbesendrehzahl in Abhängigkeit der Kehrmaschinengeschwindigkeit automatisch einstellt. www.htwg-konstanz.de Bibliographie [1] Libardo V. Vanegas-Useche, Magd M. Abdel-Wahab, Graham A. Parker - Dynamic finite element model of oscillatory brushes, Finite Elements in Analysis and Design 47 (2011) pp. 771–783 [2] Libardo V. Vanegas-Useche, Magd M. Abdel-Wahab, Graham A. Parker - Effectiveness of oscillatory gutter brushes in removing street sweeping waste, Waste Management 43 (2015) pp. 28–36 [3] Quitschau Straßenkehrmaschinen, HPE Konstanz Das Forschungsprojekt wurde durch das BMBF gefördert, Förderkennzeichen 01DT16021 Mobile Maschinen 1/2017 41